Research
Master's
Looking for my current research? Email me for a link!
Undergraduate
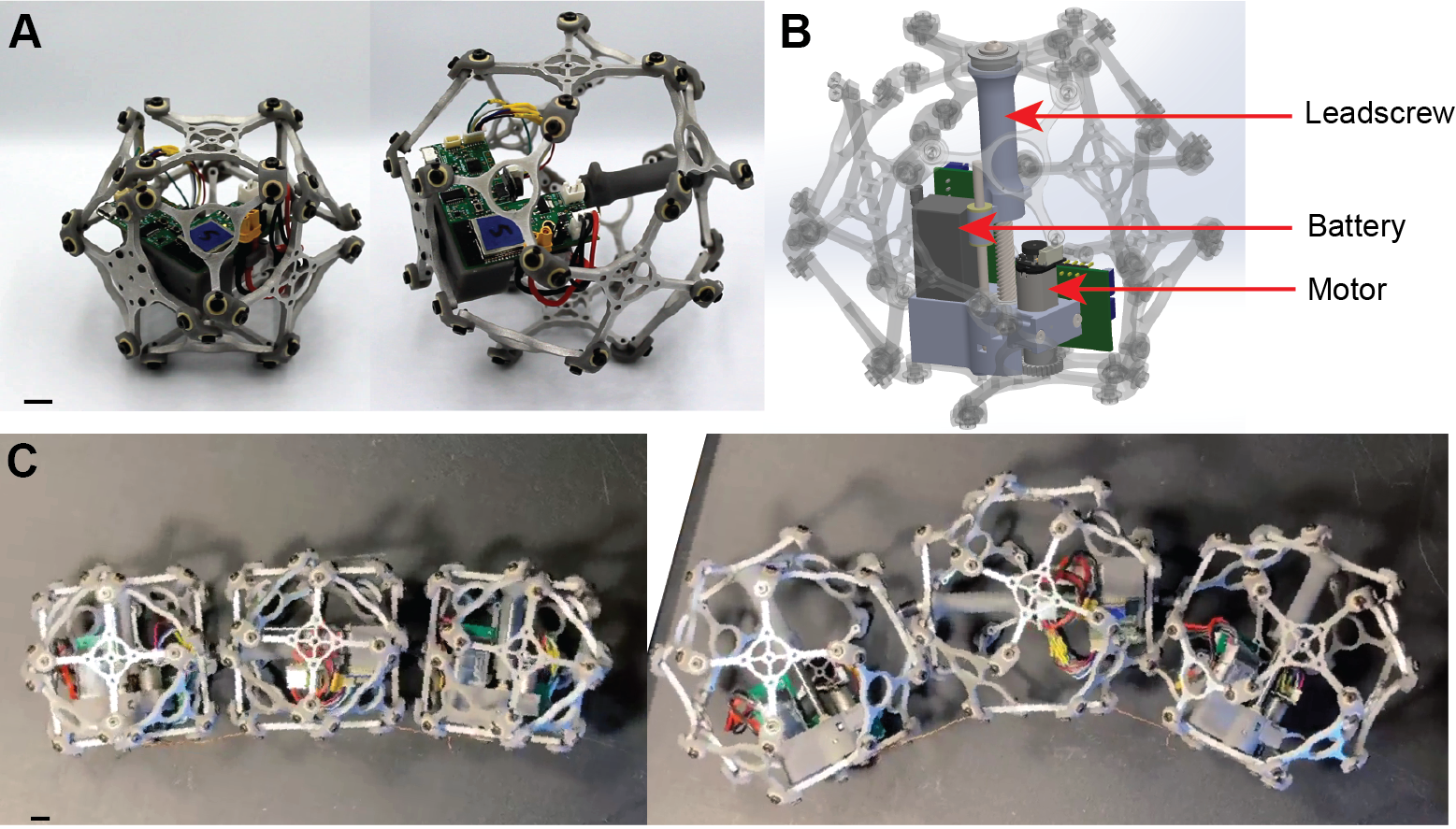
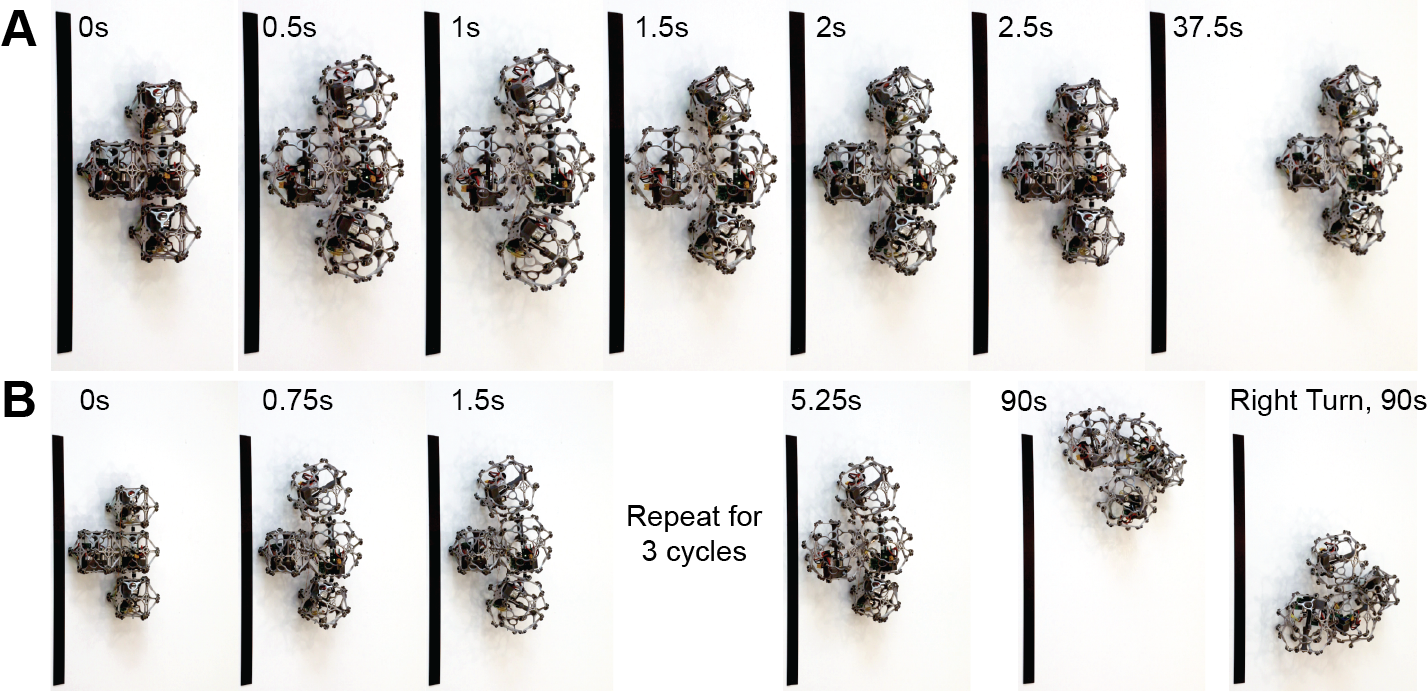
Auxbots
(2019 - 2022)
I started on this project during the summer of 2019, and developed two generations of these modular, volumetrically actuated robots. I was responsible for the entirety of the mechanical, electrical, and software design. Pictured below is the second generation that I worked on. These robots contain a highly integrated leadscrew actuator, which receives commands wirelessly from a central controller. The actuators actuate an auxetic shell inspired by the jitterbug transformation, which creates a volumetric expansion. The robots can be tiled in a cubic pattern, and with additional robot-to-robot constraints, can be used to create larger robots that can perform various tasks, including locomotion.
Paper under review. Collaborators: Lilly Chin, Max Burns
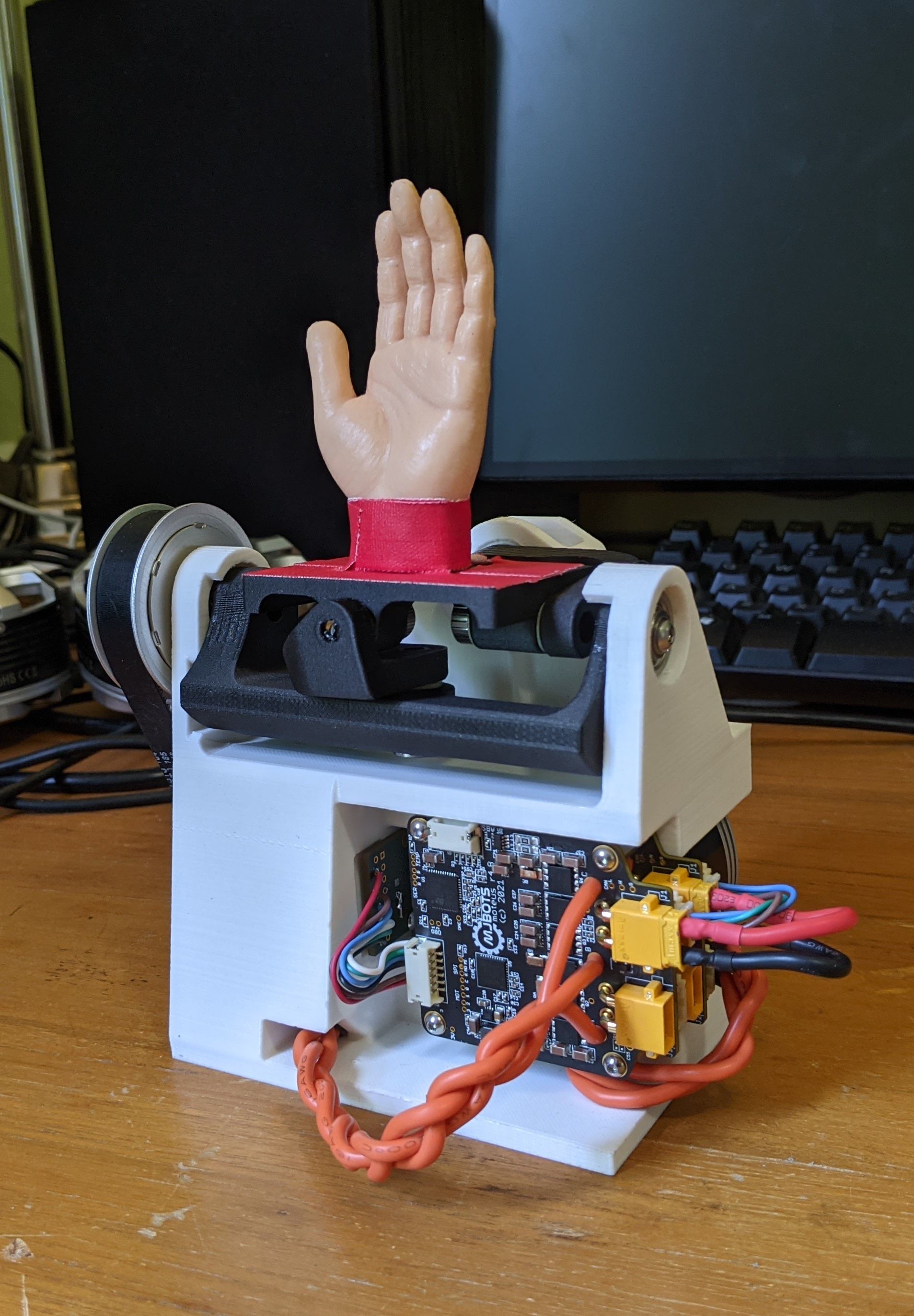
2-DOF Quasi-Direct Drive Robot Wrist
(2022)
For this project, I developed a proof-of-concept compliant wrist using QDD actuators. Two BLDC motors driven by current-controlled FOC controllers actuate a 2 degree of freedom parallel linkage, providing stiffness control in the pitch and yaw rotations. A gripper would be mounted on the output link.
Collaborators: Branden Romero